Thể loại: Thợ điện Novice, Bộ điều khiển khả trình
Số lượt xem: 8010
Bình luận về bài viết: 4
Một ví dụ về nâng cấp mạch điện của thang máy vận chuyển hàng hóa bằng bộ điều khiển khả trình (PLC)
Gần đây, chủ đề tự động hóa các quy trình công nghệ khác nhau sử dụng bộ điều khiển lập trình (PLC) đã trở nên ngày càng phổ biến. Mặc dù vậy, có rất ít bài viết thực tế trên Internet với các ví dụ thực tế về cách lập trình các PLC này. Chủ đề này rất thú vị, bởi vì nó nằm ở ngã ba của thiết bị điện, điện tử và lập trình. Học cách viết chương trình PLC là có thể mà không cần đến chúng. Chế độ mô phỏng, có sẵn trong tất cả các gói phần mềm hiện đại, giúp ích rất nhiều cho việc này.
Trong bài viết này tôi sẽ đưa ra một ví dụ về việc dịch một mạch điện được xây dựng trên các thiết bị rơle (bộ khởi động, rơle) thành một chương trình sẽ hoạt động trên bộ điều khiển. Tôi phải nói ngay rằng đây chỉ là một dự án giáo dục nhỏ và không giả vờ giải thích bất cứ điều gì ngoài việc giải thích các nguyên tắc cơ bản của lập trình PLC bằng một ví dụ cụ thể.
Rơle Rơle
Sơ đồ ban đầu cho dự án này là sơ đồ tương đối đơn giản của thang máy vận chuyển hàng hóa (thang máy vận chuyển hàng hóa) với điều khiển đòn bẩy trên hai tầng. Sơ đồ được hiển thị trong hình dưới đây.

Palăng điện thành phố với một động cơ tại hai điểm dừng
Chỉ có một động cơ trong mạch, làm tăng và giảm lực nâng giữa hai tầng. Đây là động cơ không đồng bộ ba pha có thể đảo ngược với rôto pha 380 V. Các điện trở khởi động và tiếp điểm của ba bộ khởi động điện từ được kết nối với rôto động cơ, cho phép động cơ được khởi động trong 3 giai đoạn. Giải pháp này cho phép trong quá trình khởi động động cơ để giảm dòng khởi động và tăng mô-men xoắn khởi động.
Khởi động động cơ được tự động bằng ba rơle tăng tốc (1RU - 3RU). Đây là những bộ định thời 24 volt DC thông thường. Đối với sức mạnh của họ có một máy biến áp bước xuống và chỉnh lưu.
Một phanh điện từ khối ba pha được kết nối với các cực của động cơ, khi áp vào điện áp cho động cơ, phanh trục của nó và khi điện áp biến mất, trục động cơ ngay lập tức được kẹp và cố định ở một vị trí cố định.
Động cơ đảo ngược sử dụng liên lạc của hai bộ khởi động điện từ (trong sơ đồ B và H). Cấp nguồn cho mạch được cung cấp thông qua bộ ngắt mạch (trên mạch - WU) và bộ ngắt mạch (1A).
Bao gồm trong công việc của thang máy chỉ có thể với điện áp. Nó được điều khiển bởi rơle điện áp (PH), nằm ở phía bên trái của mạch. Ngoài ra còn có ổ cắm và chuông có thể được bật từ bất kỳ trang web nào để gọi cho nhạc trưởng.
Các cửa của trục và taxi mở và đóng bằng tay. Thang máy được điều khiển bằng cách sử dụng công tắc đòn bẩy đến ba vị trí - "Lên", "Xuống" và "Không".
Khi tay cầm được di chuyển đến một trong những vị trí cực đoan, thang máy bắt đầu di chuyển và khi đạt đến tầng mong muốn, tay cầm sẽ được di chuyển một cách cơ học đến vị trí "Không". Đồng thời, các tiếp điểm trong mạch công tắc bị hỏng, cuộn dây khởi động bị mất điện, động cơ bị ngắt khỏi mạng, các tiếp điểm trong mạch rôto của nó mở và thang máy dừng lại. Sau đó, bạn có thể bắt đầu chuyển động của thang máy theo hướng ngược lại.

Thang máy vận chuyển hàng hóa thuộc về các thiết bị tăng nguy hiểm và trong sơ đồ của nó (như trong sơ đồ của bất kỳ thang máy nào), có một số lượng lớn các khóa liên động khác nhau giới hạn chuyển đổi danh bạ và liên lạc của các thiết bị bảo vệ khác nhau.
Trong sơ đồ này, đây là các công tắc hành trình (kết thúc) điều khiển việc đóng cửa cabin, trục ở tầng dưới và tầng trên, việc nâng và hạ cabin trên các khu vực trên và dưới làm việc, các tiếp điểm của "chùng của dây treo" mở ra khi cáp bị yếu hoặc nới lỏng cabin thang máy, địa chỉ liên lạc của bộ giới hạn tốc độ, bắt và căng cáp. Tổng cộng - 14 cảm biến rời rạc.
Khi bất kỳ tiếp điểm nào được liệt kê mở, động cơ thang máy phải tắt và phanh ngay lập tức, do đó tất cả các cảm biến, tiếp điểm rơle điện áp và nút dừng General General được kết nối nối tiếp với mạch cuộn dây của bộ truyền động điện từ điều khiển động cơ.
Tạo chương trình PLC cho thang máy vận chuyển hàng hóa
Nhiệm vụ là không thay đổi bất cứ thứ gì trong thiết bị, về nguyên tắc, hoạt động và điều khiển của thang máy, chuyển mạch của nó từ chế độ xem rơle lỗi thời sang một tùy chọn sử dụng bộ điều khiển khả trình.
Ưu điểm của hình thức chương trình để kiểm soát cài đặt là trong tương lai, nếu muốn, chương trình có thể dễ dàng sửa đổi, cải thiện sự tiện lợi của việc điều khiển thang máy, thay đổi logic hoạt động của nó và cải thiện chức năng của nó. Nhưng những hành động này phải đi kèm với một sự thay đổi trong thiết kế của thang máy và việc bổ sung các thiết bị bổ sung khác vào mạch. Trong phiên bản của chúng tôi, một nhiệm vụ như vậy đã không được đặt ra.
Trong trường hợp này, một tùy chọn đã được đề xuất để hiện đại hóa thiết bị điện của thang máy vận chuyển hàng hóa bằng cách thay đổi sơ đồ điều khiển của nó với cách tiếp cận như vậy, ví dụ, hoàn toàn không có gì thay đổi đối với một người vận hành cơ chế như vậy.
Do đó, chúng tôi sẽ tiết kiệm thiết bị điều khiển chính cho thang máy - công tắc đòn bẩy và để động cơ không đồng bộ với rôto pha với khởi động ba giai đoạn của nó, mặc dù chúng tôi vẫn muốn thay thế nó bằng một động cơ không đồng bộ bằng rôto lồng sóc, được bật thông qua bộ khởi động mềm. Nhưng hiện tại, chúng tôi sẽ không làm điều này, vì giải pháp này sẽ đơn giản hóa rất nhiều mạch điện của thang máy, điều này không quá phức tạp.
Vì vậy, chúng tôi sẽ chia sơ đồ của chúng tôi thành bốn khu vực (xem sơ đồ thang máy trong hình).
")
Trong khu vực 1, chúng tôi sẽ không chạm vào bất cứ điều gì, bởi vì cô chịu trách nhiệm cho cuộc gọi âm thanh của thang máy và kiểm soát sự hiện diện của điện áp trong mạch. Vùng 2 với động cơ, phanh điện từ và tiếp điểm nguồn của bộ khởi động cũng không thay đổi. Tất cả các thiết bị từ khu vực 4 có thể bị xóa, bởi vì thứ tự bao gồm các tiếp điểm trong mạch rôto của động cơ khi khởi động sẽ được điều khiển bởi bộ định thời phần mềm. Vẫn còn khu 3. Việc hiện đại hóa chính sẽ ảnh hưởng đến khu vực cụ thể này.

Là người điều khiển, chúng tôi lấy công ty PLC Aries. Chương trình cho anh ấy sẽ là trong ngôn ngữ Cfc. Theo tôi, đây là ngôn ngữ thuận tiện nhất cho người mới bắt đầu. Anh ấy rất giống vào ngôn ngữ của các khối chức năng Fbdnhưng với các tính năng nhỏ của riêng mình. Rất nhiều người yêu thích một ngôn ngữ tuyệt vời khác - ngôn ngữ bậc thang LD. Tôi không có gì chống lại, nhưng trên Cfc Nó thuận tiện hơn cho tôi khi biên dịch chương trình cho PLC, vì vậy tôi đã sử dụng ngôn ngữ này, nhưng ở đây mọi thứ đều dành cho tất cả mọi người. Để biên dịch chương trình chúng tôi sử dụng gói CoDeSys 2.3.

Một chương trình là một tập hợp các khối chức năng (VÀ, HOẶC, KHÔNG, kích hoạt và tính giờ). Chương trình làm việc của thang máy chở hàng bằng ngôn ngữ Cfc:

Ban đầu chúng ta sẽ cần các khối VÀ (yếu tố và). Ở đầu ra của phần tử là một đơn vị logic (trong chương trình -"THẬT") chỉ khi các đơn vị logic cũng có trên tất cả các đầu vào. Nếu trạng thái của một đầu vào khác với thống nhất, thì đầu ra được đặt lại về 0 (trong chương trình - "Sai").
Phần tử này sẽ giúp chúng tôi sắp xếp tất cả các liên hệ lồng vào nhau và các liên hệ an toàn (đầu vào riêng biệt) và như bạn nhớ, có 14 trong số chúng (trong chương trình chúng được chỉ định dưới tên SQ1 - SQ14). Đến đầu vào của khối VÀ chúng tôi cũng kết nối tiếp điểm của rơle điện áp và nút "Dừng chung" (SB1). Để thuận tiện, tôi đã thực hiện tất cả các liên hệ trên 3 yếu tố VÀvà sau đó sử dụng một chuỗi khác để kết hợp chúng thành một chuỗi.
Theo mặc định, khi thêm vào chương trình, bất kỳ đơn vị chức năng nào cũng có 2 đầu vào. Nếu bạn cần thêm một đầu vào bổ sung, bạn cần trỏ vào khối bằng chuột, nhấn nút bên phải trên nó và chọn "Chặn đầu vào". Vì vậy, bạn có thể thêm bất kỳ số lượng đầu vào bổ sung cần thiết nào vào khối.

Công tắc đòn bẩy được kết nối với hai đầu vào của bộ điều khiển (trong chương trình - "SA_verh" và "SA_niz"). Một công tắc ở mỗi hai vị trí cực trị của nó cung cấp một đơn vị logic cho một trong hai vị trí RS kích hoạt ("RS_verh" hoặc "RS_niz"). Một kích hoạt là một tương tự của một cuộn dây khởi động với một tiếp điểm chặn trong mạch điều khiển rơle.
Để kích hoạt nó, hãy gửi đơn vị logic đến liên hệ "THIẾT LẬP"để tắt - bật"Đặt lại". Đầu ra kích hoạt "Q1"truyền tín hiệu đến một trong các đầu ra của bộ điều khiển -"KM1" hoặc "KM2"được kết nối cuộn dây điện từ. Bộ khởi động chuyển danh bạ và điều khiển động cơ.

Bắt đầu ba giai đoạn trong chương trình được tổ chức bằng 2 bộ hẹn giờ "TÔN". Khi áp dụng một đơn vị logic cho đầu vào bộ đếm thời gian "VÀO"anh ta đếm thời gian đưa ra ở đầu vào"PT"và chuyển đổi đầu ra trễ thời gian"Q. .
Để điều khiển đầu ra (trong chương trình - KM3, KM4 và KM5) 3 cuộn dây khởi động điện từ được kết nối. Đầu tiên trong số chúng bật ngay lập tức khi bạn bật KM1 hoặc KM2 và kết nối điện trở tối đa với rôto của động cơ, KM4 và KM5 bật bằng bộ hẹn giờ và xen kẽ một phần ngắn mạch của điện trở khởi động. Sau khi khởi động động cơ, cả ba bộ khởi động vẫn ở vị trí bật.

Mục HOẶC (HOẶC logic) cần thiết để đồng thời khởi động một trong hai bộ khởi động chính, một phần của mạch chịu trách nhiệm khởi động động cơ ba giai đoạn đã được đưa vào công việc. Nếu có một đơn vị logic tại một trong các đầu vào của phần tử "HOẶC", Một đơn vị logic được truyền đến đầu ra của nó, nghĩa là, đối với hoạt động của nó, tín hiệu ở bất kỳ đầu vào nào của nó là đủ.

Giữa bộ định thời và đầu ra bộ điều khiển VÀ với một trong những đầu vào nghịch đảo (vòng tròn đầu vào). Đối với phần tử này, một đơn vị logic ở đầu ra chỉ xuất hiện khi tín hiệu đơn vị logic được áp dụng cho đầu vào bình thường và số 0 logic được áp dụng cho tín hiệu nghịch đảo.

Phần tử tương tự, chỉ có hai đầu vào nghịch đảo, nằm bên cạnh các đầu vào "SA_verh" và "SA_niz", nhận tín hiệu từ công tắc đòn bẩy. Điều này là cần thiết để đảm bảo rằng tất cả các bộ khởi động trên đầu ra đều bị tắt khi công tắc được trả về vị trí 0, khi cả hai mạch Lên và Xuống đều mở.
Nếu có hai số không logic ở đầu vào của một phần tử như vậy VÀ đưa ra một đơn vị logic ở đầu ra của phần tử. Tín hiệu này đi qua chương trình đến đầu vào của bộ kích hoạt "Đặt lại", các kích hoạt được đặt lại về 0 và các khởi động trên đầu ra bị vô hiệu hóa. VÀ với một đầu vào nghịch đảo giữa bộ định thời và đầu ra KM3 và KM4 tắt các đầu ra này và theo đó, tắt các bộ khởi động chịu trách nhiệm tắt các điện trở trong mạch rôto khi động cơ dừng lại.

Để đặt đầu vào hoặc đầu ra nghịch đảo, bạn cần di chuyển chuột đến khối chức năng, chọn đầu vào hoặc đầu ra mong muốn, nhấn nút chuột phải và chọn "Đảo ngược". Tương tự, bất kỳ đầu vào hoặc đầu ra nghịch đảo có thể được chuyển đổi thành bình thường.
Vật phẩm VÀ Số 5 và 10 không cho phép người khởi động chịu trách nhiệm điều khiển động cơ "Lên" và "Xuống" bật cùng lúc (bảo vệ chống đoản mạch trong các tiếp điểm nguồn của bộ khởi động trong khi bật chúng). Mặc dù trong sơ đồ này với một công tắc đòn bẩy, điều này là không thể.Nhưng vì việc chặn các tiếp điểm thuộc loại này đã có trong mạch chuyển tiếp ban đầu, nên đã quyết định giữ chúng trong chương trình cho PLC.
Và cuối cùng, nó vẫn đảm bảo tắt động cơ điện tức thời khi mở bất kỳ tiếp điểm nào ở đầu vào. Sự hiện diện của các kích hoạt trong mạch không cho phép điều này được thực hiện ban đầu. Để mạch hoạt động chính xác trong mọi trường hợp khẩn cấp (kích hoạt các tiếp điểm an toàn, các tiếp điểm của công tắc hành trình, tiếp điểm rơle điện áp hoặc nút "Dừng chung"), một mạch đã được thêm vào hai chuỗi yếu tố KHÔNG và HOẶC (4 và 7).
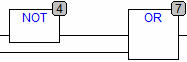
Phần tử NOT ghi đè một đơn vị logic ở đầu vào thành 0 logic ở đầu ra và ngược lại - 0 ở đầu vào thành một đơn vị ở đầu ra. Bạn có thể giải thích làm thế nào các chuỗi từ KHÔNG và HOẶC hoạt động trong chương trình không? Viết trong các ý kiến.
Giả lập chương trình CFC trong CoDeSys
Sau khi tạo chương trình, bạn có thể kiểm tra nó trong CoDeSys trong chế độ mô phỏng. Để thực hiện việc này, chọn "Chế độ mô phỏng" trong tab "Trực tuyến", nhấp vào nút "Kết nối", sau đó đặt đơn vị logic cho tất cả các đầu vào - "THẬT", ghi các giá trị này vào chương trình bằng cách nhấp vào"Ctrl" + F7 và bấm vào F5 để bắt đầu
Chế độ mô phỏng trongCoDeSys:

Mô phỏng chuyển đổi đầu vào ("THẬT"và"Sai") bạn có thể xem sự thay đổi của các mạch màu xanh lam (đường dẫn tín hiệu) và sự thay đổi trạng thái của các đầu ra. Sau mỗi lần thay đổi trạng thái đầu vào, đừng quên ghi các giá trị này vào chương trình bằng cách nhấn"Ctrl" + F7. Để tắt chế độ mô phỏng, nhấp vào "Dừng", sau đó "Ngắt kết nối" trên tab "Trực tuyến" và bỏ chọn "Chế độ mô phỏng".
Kết luận
Một lần nữa, tôi muốn lưu ý rằng dự án này chỉ liên quan đến mục đích giáo dục và chưa được thử nghiệm trên bộ điều khiển khả trình thực sự. Nếu bạn có bất kỳ câu hỏi nào và một số câu hỏi trên không rõ ràng, hãy hỏi trong các bình luận, tôi sẽ cố gắng trả lời chúng. Và nó cũng rất quan trọng đối với tôi để có câu trả lời cho câu hỏi - tôi có nên tiếp tục viết bài về chủ đề này không? Nói chung, tôi sẵn sàng lắng nghe bất kỳ ý kiến và đề xuất mang tính xây dựng.
Xem thêm tại electro-vi.tomathouse.com
: