Thể loại: Mạch vi điều khiển
Số lượt xem: 13565
Bình luận về bài viết: 0
Tính năng kết nối thiết bị với Arduino
Nền tảng cho người yêu thích robot và tự động hóa Arduino nổi tiếng với thiết kế mô-đun và dễ sử dụng. Đôi khi tôi bắt gặp một quảng cáo nơi họ nói rằng bạn có thể lắp ráp robot của mình mà không thực sự quen thuộc với thiết bị điện tử. Nhưng điều này không hoàn toàn đúng.
Nếu một số cơ cấu chấp hành và cơ chế được kết nối không chính xác, bạn có thể ghi các cổng arduinka (như tôi đã đề cập trong bài viết về Làm thế nào để không đốt cháy Arduino). Và nếu bạn không biết cách xử lý các thiết bị kỹ thuật số - tốt nhất là bạn sẽ không thể thiết lập kết nối.

Tôi đã mua một vài mô-đun cho arduino, phải làm gì tiếp theo?
Để tìm hiểu về các tính năng của kết nối, điện áp nguồn, mức logic, v.v., bạn cần làm quen với biểu dữ liệu trên mô-đun của mình.
Bảng dữ liệu hoặc biểu dữ liệu là tài liệu kỹ thuật cho sản phẩm. Tài liệu này có thể được tải xuống bất kỳ chip hoặc cảm biến. Thông thường họ đang ở trên trang web của nhà sản xuất. Ngoài ra, có các tài nguyên đặc biệt trên mạng, trên đó thu thập toàn bộ tài liệu kỹ thuật
Đọc thông tin từ bảng dữ liệu một cách cẩn thận, nhưng tôi nên tìm gì? Thứ nhất, một con chip, ngoài phần chính của tên, thường có một phần hoặc tiền tố thay đổi - thường là một hoặc nhiều chữ cái.
Điều này cho thấy một số tính năng của một vi mạch cụ thể, ví dụ: công suất tối đa, điện áp cung cấp và mức logic (nếu thiết bị là kỹ thuật số), có thể là trường hợp được thực thi, v.v.
Nếu bạn không tìm thấy thông tin dinh dưỡng và đăng nhập vào biểu dữ liệu. các cấp độ, liên hệ với các cộng đồng arduino nói tiếng Nga, trên các diễn đàn của họ, các tính năng của tất cả các mô-đun phổ biến thường được xem xét.
ArduinoUno có điện áp cung cấp và mức logic 5 V, nếu thiết bị bên ngoài hoạt động trong phạm vi 3,3 V, bạn sẽ phải tạo ra chúng, bạn có thể bố trí nguồn bằng bộ ổn định LDO (tuyến tính với mức giảm thấp, để ổn định tối thiểu 1,3 volt điện áp vượt quá hiện tại, so với 2 volt trên bộ ổn định của dòng 78xx, cho phép bạn nhận được 3,3 volt từ 4,5 volt (pin ba ngón tay).

Tài liệu kỹ thuật cho các thiết bị và cảm biến kỹ thuật số cũng chỉ ra tên của các giao thức mà chúng "giao tiếp" với nhau. Đây có thể là các giao thức và tiêu chuẩn riêng, giống nhau:
-
UART
-
I2C;
-
SPI
Arduino làm việc với họ. Điều này sẽ giúp bạn dễ dàng tìm thấy các thư viện và mẫu mã được tạo sẵn.
Điều hòa tín hiệu và khuếch đại
Các câu hỏi về kết hợp các thiết bị và bộ truyền động với arduino khá thường xuyên xuất hiện giữa những người mới bắt đầu. Chúng tôi sẽ xem xét những người phổ biến:
1. Nối mạch điện áp.
2. Sự phối hợp công suất của chân đầu ra và bộ truyền động, nói cách khác là sự khuếch đại điện áp và / hoặc dòng điện.
Cấp độ phù hợp
Tôi nên làm gì nếu các mức logic trên mô-đun của tôi là 3,3 Volts và trên arduino 5 Volts? Nó khá đơn giản để sử dụng một trình chuyển đổi mức logic. Nó có thể được lắp ráp từ các phần tử rời rạc hoặc bạn có thể mua một mô-đun làm sẵn trên bảng, ví dụ như sau:

Một công cụ chuyển đổi như vậy là hai chiều, tức là nó hạ thấp mức cao và tăng phản hồi thấp. LV (1,2,3,4) - nền tảng để kết nối tín hiệu mức thấp, HV (1,2,3,4) - mức cao, HV và LV không có số - đây là các điện áp 5 và 3,3 Vôn, như với các nguồn tín hiệu được chuyển đổi GND - dây nối đất hoặc âm. Trong một trường hợp cụ thể có 4 kênh độc lập.
Mạch phù hợp với sự khác biệt điện áp lớn
Nếu bạn định khởi động tín hiệu, ví dụ từ các mạch điện áp cao, ví dụ 220 V, bạn cần sử dụng bộ ghép quang.Điều này sẽ cung cấp sự cách ly và bảo vệ điện đối với các vụ nổ điện áp cao của các đầu vào của vi điều khiển. Các mạch như vậy được sử dụng cả để nhận tín hiệu và tín hiệu đầu ra từ vi điều khiển đến mạng, cũng như để kiểm soát triacs trong chuỗi.

Xác suất xuất hiện tiềm năng cao trên bo mạch arduino trong trường hợp này là rất nhỏ, điều này được đảm bảo khi không có tiếp xúc điện và giao tiếp thông qua kênh quang, tức là với sự giúp đỡ của ánh sáng. Bạn có thể tìm hiểu thêm về điều này bằng cách nghiên cứu các thiết bị quang điện tử và quang điện tử.
Nếu một bước nhảy lớn xảy ra, bộ ghép quang sẽ bị cháy, hình ảnh là PC8171, nhưng bạn sẽ không làm quá tải các cổng của vi điều khiển.
Kết nối người tiêu dùng mạnh mẽ
Vì vi điều khiển chỉ có thể điều khiển hoạt động của các thiết bị, bạn không thể kết nối một người tiêu dùng mạnh mẽ với cổng của nó. Ví dụ về những người tiêu dùng như vậy:
-
Rơle
-
Solenoit;
-
Động cơ điện;
-
Phục vụ.
1. Kết nối servo
Nhiệm vụ chính của ổ đĩa servo là đặt vị trí của rôto được kết nối với bộ truyền động, để điều khiển và thay đổi nó bằng những nỗ lực nhỏ. Đó là, với sự trợ giúp của chiết áp, nếu ổ servo được thiết kế để xoay trong vòng nửa vòng quay (180 độ) hoặc với sự trợ giúp của bộ mã hóa, nếu cần quay vòng tròn (360 độ), bạn có thể điều khiển vị trí của trục servo (động cơ điện trong trường hợp của chúng tôi).

Nhiều người đam mê robot sử dụng arduino làm nền tảng cho robot của họ. Ở đây, servo đã tìm thấy công dụng tuyệt vời. Chúng được sử dụng như một ổ đĩa của các cơ chế quay cho máy ảnh, cảm biến và tay cơ khí. Các nhà mô hình vô tuyến sử dụng để lái các bánh xe quay trong các mô hình xe hơi. Ngành công nghiệp sử dụng các ổ đĩa lớn trong máy CNC và tự động hóa khác.

Trong các dịch vụ nhỏ nghiệp dư, một bảng với cảm biến vị trí và thiết bị điện tử được tích hợp trong vỏ. Ba dây thường đi ra khỏi chúng:
-
Màu đỏ - cộng với sức mạnh, nếu một ổ đĩa mạnh được kết nối tốt hơn với nguồn bên ngoài và không phải với bo mạch Arduino;
-
Đen hoặc nâu - trừ, kết nối cũng như cộng;
-
Màu vàng hoặc màu cam - tín hiệu điều khiển - nó được cung cấp từ chân kỹ thuật số của vi điều khiển (đầu ra kỹ thuật số).
Một thư viện đặc biệt được cung cấp để quản lý máy chủ, quyền truy cập vào nó được khai báo ở đầu mã bằng lệnh "#include servo.h".
Kết nối động cơ
Để điều khiển các cơ chế và điều chỉnh tốc độ quay của chúng, cách dễ nhất là sử dụng DPT (một động cơ DC cọ với sự kích thích từ nam châm vĩnh cửu). Bạn có thể thấy động cơ như vậy trong xe ô tô điều khiển vô tuyến. Chúng dễ dàng đảo ngược (bật để xoay theo đúng hướng) bạn chỉ cần thay đổi cực. Đừng cố gắng kết nối chúng với các chân trực tiếp!
Sử dụng tốt hơn một bóng bán dẫn. Sẽ phù hợp bất kỳ lưỡng cực, ít nhất là độ dẫn trực tiếp (pnp), ít nhất là đảo ngược (npn). Trường cũng hoạt động, nhưng khi chọn một trường cụ thể, hãy chắc chắn rằng màn trập của nó hoạt động với mức logic?
Mặt khác, nó sẽ không mở hoàn toàn, hoặc bạn sẽ đốt đầu ra kỹ thuật số của vi điều khiển trong khi sạc điện dung cổng - họ sử dụng trình điều khiển, cách đơn giản nhất là bơm tín hiệu qua bóng bán dẫn lưỡng cực. Dưới đây là mạch điều khiển thông qua bóng bán dẫn hiệu ứng trường.

Nếu không có điện trở giữa G và S, thì màn trập (G) sẽ không được kéo xuống đất và có thể tự nhiên đi bộ ra khỏi nhiễu.
Làm thế nào để xác định rằng một bóng bán dẫn hiệu ứng trường phù hợp để điều khiển trực tiếp từ vi điều khiển, xem bên dưới. Trong biểu dữ liệu, tìm tham số Vss, ví dụ, đối với IRL540, tất cả các phép đo và đồ thị được gắn với Vss = 5v, ngay cả một tham số như điện trở kênh mở được chỉ định cho điện áp này giữa cổng và nguồn.


Ngoài DPT của bàn chải, bộ làm mát có thể được kết nối từ máy tính theo cùng một cách, mặc dù có một động cơ không chổi than, các cuộn dây được điều khiển bởi bộ chuyển đổi tích hợp, bảng được đặt trực tiếp trong vỏ của nó.
Vòng quay của hai loại động cơ này dễ dàng điều chỉnh bằng cách thay đổi điện áp cung cấp. Điều này có thể được thực hiện nếu cơ sở bóng bán dẫn được kết nối không phải bằng kỹ thuật số (đầu ra kỹ thuật số), nhưng với một pin (~ pwm), giá trị của nó được xác định bởi chức năng "analogWrite ()".
Rơle và Solenoids
Đối với các mạch chuyển mạch khi không cần quy định và việc chuyển đổi thường xuyên thuận tiện để sử dụng rơle. Bằng cách chọn đúng, bạn có thể chuyển đổi bất kỳ dòng điện và điện áp nào với tổn thất tối thiểu về độ dẫn và làm nóng đường dây điện.
Để làm điều này, áp dụng điện áp cần thiết cho cuộn dây rơle. Trên mạch rơle, cuộn dây của nó được thiết kế để điều khiển 5 volt, các tiếp điểm nguồn có thể chuyển đổi cả một cặp volt và mạng 220 V.

Solenoids là cuộn hoặc thiết bị truyền động điện từ.
Ví dụ:
-
Các ổ khóa cửa xe;
-
Van điện từ;
-
Nam châm điện trong sản xuất luyện kim;
-
Nhà máy điện của súng Gaussian và nhiều hơn nữa.
Trong mọi trường hợp, một mạch điển hình để kết nối cuộn dây DC với vi điều khiển hoặc logic trông như thế này:
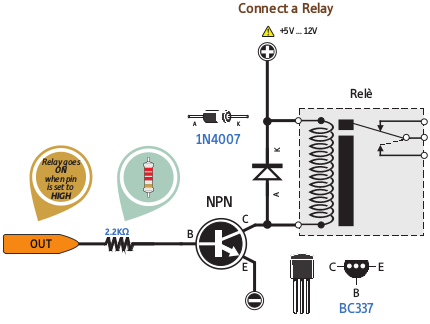
Một bóng bán dẫn để khuếch đại dòng điều khiển, diode được kết nối theo hướng ngược lại để bảo vệ đầu ra của vi điều khiển khỏi sự bùng nổ của EMF tự cảm ứng.

Thiết bị đầu vào và cảm biến
Bạn có thể điều khiển hệ thống của mình bằng các nút, điện trở, bộ mã hóa. Sử dụng nút này, bạn có thể gửi tín hiệu đến đầu vào kỹ thuật số ở mức cao arduino (cao / 5V) hoặc thấp (thấp / 0V).
Để làm điều này, có hai lựa chọn để đưa vào. Bạn cần một nút mở bình thường mà không cần sửa, đối với một số mục đích, bạn cần một công tắc bật tắt hoặc một nút có sửa chữa - chọn cho mình, tùy thuộc vào tình huống. Để gửi một đơn vị, bạn cần kết nối tiếp điểm đầu tiên của nút với nguồn điện và thứ hai với điểm kết nối của điện trở và đầu vào của vi điều khiển.

Khi nhấn nút trên điện trở, điện áp cung cấp giảm, nghĩa là mức cao. Khi không nhấn nút, không có dòng điện trong mạch, điện thế trên điện trở thấp, tín hiệu "Thấp / 0V" được đưa vào đầu vào. Điều kiện này được gọi là "pin được kéo xuống đất và điện trở là" kéo xuống ".
Nếu bạn muốn vi điều khiển nhận 0 thay vì 1 khi bạn nhấp vào nút, hãy kết nối nút thường đóng theo cách tương tự hoặc đọc về cách thực hiện với mở thông thường.

Để cung cấp cho vi điều khiển một lệnh có tín hiệu bằng 0, mạch sẽ thay đổi một chút. Một chân điện trở được kết nối với điện áp cung cấp, chân thứ hai đến điểm kết nối của nút mở thông thường và đầu vào kỹ thuật số của arduino.
Khi nút được giải phóng, tất cả điện áp vẫn còn trên nó, đầu vào sẽ ở mức cao. Trạng thái này được gọi là "pin được kéo lên cộng" và điện trở là "pull-up". Khi bạn nhấn nút, bạn sẽ tắt (đóng) lối vào mặt đất.
Bộ chia điện áp và tín hiệu đầu vào từ chiết áp và điện trở tương tự

Bộ chia điện áp được sử dụng để kết nối các điện trở thay đổi, chẳng hạn như nhiệt điện trở, quang điện trở, v.v. Do thực tế là một trong các điện trở không đổi và biến thứ hai - bạn có thể quan sát sự thay đổi điện áp ở điểm giữa của chúng, trong hình trên, nó được chỉ định là Ur.
Do đó, có thể kết nối các cảm biến tương tự khác nhau của loại điện trở và cảm biến, dưới tác động của ngoại lực, thay đổi độ dẫn của chúng. Cũng như chiết áp.
Trong hình dưới đây bạn thấy một ví dụ về kết nối các yếu tố như vậy. Chiết áp có thể được kết nối mà không cần một điện trở bổ sung, sau đó ở vị trí cực trị sẽ có điện áp đầy đủ, nhưng ở vị trí tối thiểu cần phải đảm bảo ổn định hoặc giới hạn dòng điện - nếu không nó sẽ đoản mạch.

Kết luận
Để kết nối bất kỳ mô-đun nào và ngoài vi điều khiển mà không có lỗi, bạn cần biết các kiến thức cơ bản về kỹ thuật điện, định luật Ohm, thông tin chung về điện từ, cũng như các điều cơ bản về hoạt động của các thiết bị bán dẫn. Trên thực tế, bạn có thể chắc chắn rằng việc này dễ thực hiện hơn nhiều so với việc nghe những từ phức tạp này. Sử dụng các sơ đồ từ bài viết này trong các dự án của bạn!
Xem thêm tại electro-vi.tomathouse.com
: